跨语言超时机制全解析
从"等不起"到"不想等":跨语言超时机制全解析
“A distributed system is one in which the failure of a computer you didn’t even know existed can render your own computer unusable.”
—— Leslie Lamport在分布式系统中,超时是应用与混沌之间最后一道防线。没有超时的 RPC 调用,如同没有刹车的汽车——迟早会撞上墙。
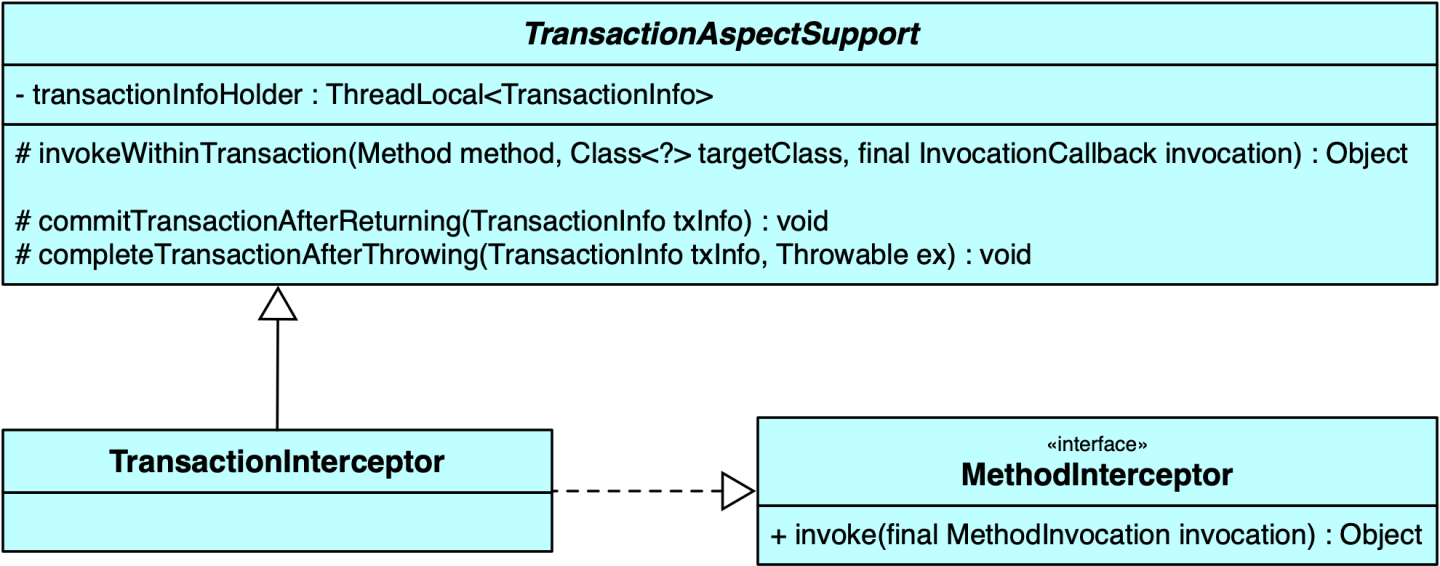
许多 Java 开发者对超时的认知停留在 Future.get(timeout, unit) 这一层,其底层依赖 LockSupport.parkNanos 和自旋等待。然而,翻阅 HSF/Dubbo 的源码会发现,这些 RPC 框架选择的是 HashedWheelTimer(时间轮)。
这就引出了一个值得深究的问题:为什么不直接用 Future.get 的超时版本?时间轮到底解决了什么问题?
事实上,仅 Java 一门语言就存在三种截然不同的超时实现范式。再放眼 Go、JavaScript、Ruby,每种语言对"超时"的理解和实现路径各有不同。本文试图从跨语言的视角,系统梳理这一主题。
1. 超时的本质:一个工程哲学问题
在进入具体实现之前,有必要先厘清一个基本问题:超时到底是什么?
从最朴素的角度看,超时就是:"调用方愿意等待,但不会永远等待。"
但"等待"这个动作,在不同的并发模型里有完全不同的含义:
| 并发模型 | "等待"的含义 | 超时的实现方式 | 代表语言 |
|---|---|---|---|
| 线程模型 | 线程阻塞(park/sleep) | 唤醒阻塞的线程 | Java |
| CSP 模型 | goroutine 阻塞在 channel | select + timer channel | Go |
| 事件循环 | 回调尚未触发 | setTimeout / clearTimeout | JavaScript |
| 纤程/协程 | Fiber 让出执行权 | Timeout 模块包装 | Ruby |
mindmap
root((超时))
谁在等?
线程 Thread
协程 Goroutine
事件循环 Event Loop
纤程 Fiber
等什么?
IO 完成
锁释放
Future 就绪
Channel 有数据
怎么停?
中断 Interrupt
取消 Cancel
超时异常 TimeoutError
Channel 关闭
谁来通知?
等待者自己轮询
调度器唤醒
定时器回调
时间轮扫描1.1 超时的两个核心维度
任何超时机制都需要回答两个问题:
维度一:谁负责计时?
graph LR
A[计时策略] --> B[等待者自己计时]
A --> C[外部定时器计时]
B --> D["自旋 + System.nanoTime()"]
B --> E["parkNanos / sleep"]
C --> F["ScheduledExecutorService"]
C --> G["HashedWheelTimer"]
C --> H["select + time.After"]
C --> I["setTimeout"]
style B fill:#FFE0B2
style C fill:#C8E6C9维度二:超时后怎么处理?
| 处理方式 | 描述 | 优点 | 缺点 | 典型场景 |
|---|---|---|---|---|
| 抛异常 | TimeoutException |
调用方感知明确 | 需要 try-catch | Future.get(timeout) |
| 返回特殊值 | 返回 null/false/Optional.empty() |
无异常开销 | 容易被忽略 | BlockingQueue.poll(timeout) |
| 中断线程 | 设置中断标志位 | 可以终止阻塞操作 | 需要任务配合检查 | Thread.interrupt() |
| 取消任务 | Future.cancel(true) |
语义清晰 | 不保证立即停止 | CompletableFuture |
| 关闭 channel | 通过 channel 传递取消信号 | 天然适配 CSP | 需要 select 配合 | Go context.WithTimeout |
| 清除回调 | clearTimeout |
零成本取消 | 仅适用于事件循环 | Node.js |
1.2 四种语言的超时全景
graph TB
subgraph Java["Java - 线程模型"]
J1["方式1: 自旋 + parkNanos<br/>最底层,手动控制"]
J2["方式2: Future.get(timeout)<br/>最常用,阻塞等待"]
J3["方式3: HashedWheelTimer<br/>高吞吐,异步回调"]
J1 --> J2
J2 -.->|"底层依赖"| J1
J3 -.->|"独立机制"| J1
end
subgraph Go["Go - CSP 模型"]
G1["context.WithTimeout<br/>标准做法,传播取消"]
G2["select + time.After<br/>channel 级超时"]
G3["time.AfterFunc<br/>回调式超时"]
end
subgraph JS["JavaScript - 事件循环"]
JS1["Promise.race + setTimeout<br/>Promise 级超时"]
JS2["AbortController + signal<br/>fetch/stream 取消"]
JS3["AsyncLocalStorage<br/>上下文传播"]
end
subgraph Ruby["Ruby - 纤程模型"]
R1["Timeout.timeout<br/>标准库,基于线程"]
R2["IO.select 超时<br/>IO 级超时"]
R3["Fiber + Timer<br/>协程式超时"]
end
style Java fill:#FFF3E0
style Go fill:#E8F5E9
style JS fill:#FFFDE7
style Ruby fill:#FCE4EC了解了超时的本质和四种语言的概貌后,接下来我们深入剖析每种语言的具体实现——从最复杂的 Java 开始,逐步揭示不同并发模型下的超时设计哲学。
2. Java:三种超时范式的深度剖析
Java 的超时实现是最复杂的,因为其并发模型最"重"——每个并发单元都是一个操作系统线程。线程的阻塞和唤醒涉及用户态/内核态切换,成本不低。这直接影响了超时机制的设计选择。
2.1 方式一:自旋 + parkNanos — 最原始的超时
这是最底层的超时实现,也是其他所有 Java 超时机制的基石。核心思路:等待者自己计时,自己等待,时间到了自己醒来。
2.1.1 基本原理
sequenceDiagram
participant Caller as 调用方线程
participant OS as 操作系统
participant Clock as 系统时钟
Caller->>Clock: 记录 deadline = now + timeout
loop 自旋等待
Caller->>Caller: 检查条件是否满足?
alt 条件满足
Caller->>Caller: return 结果
else 条件未满足
Caller->>Clock: 计算 remaining = deadline - now
alt remaining <= 0
Caller->>Caller: throw TimeoutException
else remaining > 0
Caller->>OS: LockSupport.parkNanos(remaining)
OS-->>Caller: 唤醒(超时/unpark/中断)
end
end
end2.1.2 AQS 中的超时等待:教科书级实现
AbstractQueuedSynchronizer 是 Java 并发包的基石,其 doAcquireNanos 方法是自旋+超时等待的标准实现。以下逐行拆解(为提升可读性,部分变量已重命名,如 p -> predecessor、s -> currentState、q -> waitNode,实际 JDK 源码使用单字母变量名):
1 | |
这段代码有几个精妙之处:
精妙一:绝对时间 vs 相对时间
1 | |
这里 nanosTimeout 变量扮演了双重角色:既是超时判断的依据(<= 0 表示超时),也是park 等待的时长参数。这种设计确保了等待时间的精确性:
- 超时判断:
if (nanosTimeout <= 0L) return false;—— 剩余时间耗尽,判定超时 - 等待时长:
LockSupport.parkNanos(this, nanosTimeout);—— 用剩余时间作为 park 的参数
关键在于理解 deadline 和 nanosTimeout 的区别:
deadline(绝对时间):循环开始时计算一次,之后不再改变。表示"必须在哪个时间点之前完成",是一个固定的绝对时间戳nanosTimeout(剩余时间):每轮循环开始时重新计算,表示"距离 deadline 还有多少纳秒"。随着时间流逝,这个值会不断递减
1 | |
如果使用固定时长(如 parkNanos(3000))而不动态计算剩余时间,在多次循环后实际等待时间会超过原始超时限制。动态重算 nanosTimeout 的方式,即使经过 N 次虚假唤醒,累计等待时间也不会超过初始设定的 timeout。
精妙二:自旋阈值
1 | |
graph LR
A["剩余时间"] --> B{"> 1 微秒?"}
B -->|Yes| C["parkNanos<br/>让出 CPU,等待唤醒"]
B -->|No| D["自旋<br/>CPU 空转等待"]
C --> E["唤醒后重新检查"]
D --> E
E --> F{"条件满足?"}
F -->|Yes| G["返回成功"]
F -->|No| H{"已超时?"}
H -->|Yes| I["返回失败"]
H -->|No| A
style C fill:#C8E6C9
style D fill:#FFE0B2精妙三:中断响应
1 | |
虚假唤醒是 POSIX 条件变量的已知行为,LockSupport.parkNanos 在 Linux/HotSpot 环境下底层依赖 pthread_cond_timedwait,因此也可能发生虚假唤醒。代码通过循环结构自然地处理了这种情况——虚假唤醒后,线程会重新计算剩余时间并继续尝试获取锁或等待,而不会误判为超时。
2.1.3 适用场景与局限
| 维度 | 评价 |
|---|---|
| 精度 | 纳秒级,最高精度 |
| 开销 | 每个等待者占用一个线程 |
| 适用场景 | 锁获取、条件等待、底层同步原语 |
| 不适用 | 大量并发超时(如万级 RPC 请求) |
核心局限:一个等待 = 一个线程。如果有 10000 个 RPC 请求同时在等超时,就需要 10000 个线程阻塞在 parkNanos 上。这正是 HSF/Dubbo 不采用此方式的根本原因。
2.2 方式二:Future.get(timeout) — 最常用的超时
这是大多数 Java 开发者最熟悉的超时方式。本质上,它是方式一的一个上层封装。
2.2.1 调用链路
graph TB
A["future.get(3, SECONDS)"] --> B["FutureTask.get(timeout)"]
B --> C["awaitDone(timed, nanos)"]
C --> D{"state 已完成?"}
D -->|Yes| E["返回结果"]
D -->|No| F["创建 WaitNode"]
F --> G["LockSupport.parkNanos(nanos)"]
G --> H{"唤醒原因?"}
H -->|"任务完成 (unpark)"| I["返回结果"]
H -->|"超时"| J["throw TimeoutException"]
H -->|"中断"| K["throw InterruptedException"]
style A fill:#E3F2FD
style J fill:#FFCDD2
style K fill:#FFCDD22.2.2 FutureTask.awaitDone 源码剖析
1 | |
值得注意的设计:每次循环只做一件事。第一次循环创建 WaitNode,第二次循环入队,第三次循环才 park。这种"渐进式"设计避免了不必要的对象创建和队列操作——如果任务在前两次循环中就完成了,则无需 park。
渐进式状态机模式(Incremental State Machine)
这种设计模式值得深入剖析,它体现了 Doug Lea 在并发编程中的精妙思想:
核心设计理念:用循环驱动的状态机替代嵌套的条件分支
1 | |
设计精妙之处
-
渐进式推进(Incremental Progression)
- 不假设任何操作是原子的,每次循环只推进一个状态
waitNode == null创建节点 →!queued入队 →park阻塞- 如果任务在任何一步之前完成,后续步骤都被跳过
-
状态可变性假设(State Volatility Assumption)
- 每次循环重新检查
state,假设其他线程可能已修改 - 即使已经创建了
waitNode,下一轮循环发现任务已完成,立即返回 - 这是乐观并发控制的典型应用
- 每次循环重新检查
-
中断优先(Interruption First)
- 中断检查放在循环最前面,确保响应性
- 即使任务已完成,如果线程被中断,仍抛出
InterruptedException
-
无锁入队(Lock-free Enqueue)
- 使用
UNSAFE.compareAndSwapObject原子地将节点插入等待链表 - 失败则重试(下一轮循环),成功则标记
queued = true
- 使用
与传统设计对比
1 | |
适用场景
这种模式适用于需要处理以下情况的并发场景:
- 状态可能被其他线程修改:每次循环重新读取状态
- 操作可能失败或需要重试:如 CAS 入队
- 需要快速响应中断:中断检查优先级最高
- 希望避免不必要的资源消耗:渐进式推进,能省则省
借鉴要点
在日常开发中,可以借鉴以下原则:
- 单次循环,单一职责:不要在一个循环里做太多事情
- 状态检查前置:每次循环开始先检查是否可以提前返回
- 乐观假设,防御验证:假设状态可能变化,每次都重新验证
- 中断优先:长时间阻塞的操作必须先检查中断标志
- 原子操作,失败重试:CAS 操作失败后,下一轮循环重试,而非自旋死等
这种设计模式在 JDK 源码中多处出现,如 AQS.doAcquireNanos、CountDownLatch.await、CyclicBarrier.await 等,是 Java 并发包的核心设计范式。
2.2.3 Future.get 超时的问题
问题一:超时不等于取消
1 | |
sequenceDiagram
participant Caller as 调用方
participant Future as FutureTask
participant Worker as 工作线程
Caller->>Future: get(3s)
Future->>Caller: parkNanos(3s)
Note over Worker: 任务执行中...
Caller->>Caller: 3秒到,TimeoutException
Note over Worker: 任务仍在执行
Note over Caller: 若不 cancel,<br/>工作线程将继续占用资源
Caller->>Future: cancel(true)
Future->>Worker: interrupt()
Worker->>Worker: 检查中断标志问题二:一个 Future 一个线程
1 | |
CompletableFuture.allOf 提供了一种更现代的批量任务等待方式。从超时控制的角度看,它的核心价值在于将"逐个等待"转变为"整体等待",从而简化超时语义:
1 | |
与逐个 Future.get(timeout) 相比,allOf 的超时语义更直观:逐个等待的总时间是 N x timeout(串行),而 allOf 的总时间是 max(各任务时间)(并行)。但需要注意,allOf 本身不提供超时功能,必须配合 get(timeout) 或 orTimeout 使用。关于 CompletableFuture.allOf 的更多设计细节(统一异常处理、组合式编程等),可参考 Java 线程池笔记 中 CompletableFuture 章节的讨论。
核心问题:Future.get(timeout) 是同步阻塞的。调用方线程在等待期间什么都做不了。如果存在大量并发请求需要超时控制,每个请求都阻塞一个线程来等待,线程资源很快就会耗尽。
2.3 方式三:HashedWheelTimer(时间轮)— 高吞吐的超时
这正是 HSF/Dubbo/Netty 选择的方案。它解决的核心问题是:当存在海量并发超时任务时,如何高效地管理它们?
2.3.1 为什么需要时间轮?
考虑一个真实场景:
一个 Dubbo 服务端,QPS 10000,每个请求超时时间 3 秒。
这意味着在任意时刻,有约 30000 个请求在"等待超时"。
如果用 Future.get(timeout):需要 30000 个线程阻塞等待。这显然不现实。
如果用 ScheduledExecutorService:
1 | |
ScheduledExecutorService 底层是最小堆(DelayQueue),每次插入/删除的时间复杂度是 O(log n)。30000 个任务,每次操作约 15 次比较。表面上看尚可接受。
但问题在于:大部分请求会在超时前正常返回,需要取消超时任务。取消操作是 O(1)(直接移除堆顶元素后,堆化操作需要 O(log n),但通过标记删除可实现 O(1))。而且 DelayQueue 的锁竞争在高并发下会成为瓶颈。
ScheduledExecutorService 底层数据结构深度解析
要理解为什么 ScheduledExecutorService 不适合高并发超时场景,需要深入其底层实现。
组件架构图
graph TB
subgraph ScheduledThreadPoolExecutor["ScheduledThreadPoolExecutor 架构"]
direction TB
CorePool["核心线程池<br/>ThreadPoolExecutor"]
DelayQueue["DelayedWorkQueue<br/>延迟队列(最小堆)"]
WorkerThreads["Worker 线程组"]
CorePool -->|"提交任务"| DelayQueue
DelayQueue -->|"获取到期任务"| WorkerThreads
WorkerThreads -->|"循环获取"| DelayQueue
end
subgraph DelayedWorkQueueDetail["DelayedWorkQueue 内部结构"]
direction TB
HeapArray["堆数组 RunnableScheduledFuture[]"]
ReentrantLock["ReentrantLock<br/>保证线程安全"]
Condition["Condition available<br/>任务可用通知"]
HeapArray -->|"索引计算"| Index["parent = (i-1)/2<br/>left = 2*i+1<br/>right = 2*i+2"]
ReentrantLock -->|"保护"| HeapArray
Condition -->|"唤醒等待线程"| WorkerThreads
end
CorePool -.->|"内部使用"| DelayedWorkQueueDetail
style DelayQueue fill:#FFE0B2
style HeapArray fill:#C8E6C9
style ReentrantLock fill:#FFCDD2DelayedWorkQueue 最小堆结构
graph TB
subgraph MinHeap["最小堆结构示意(小顶堆)"]
direction TB
Root["[0] delay=100ms<br/>任务A"]
L1["[1] delay=200ms<br/>任务B"]
R1["[2] delay=300ms<br/>任务C"]
L2["[3] delay=400ms<br/>任务D"]
R2["[4] delay=500ms<br/>任务E"]
L3["[5] delay=600ms<br/>任务F"]
R3["[6] delay=700ms<br/>任务G"]
Root --> L1
Root --> R1
L1 --> L2
L1 --> R2
R1 --> L3
R1 --> R3
end
subgraph HeapProperty["堆性质"]
P1["父节点 delay ≤ 子节点 delay"]
P2["根节点 [0] 始终是 delay 最小的任务"]
P3["插入/删除需要上浮/下沉调整"]
end
style Root fill:#C8E6C9
style HeapProperty fill:#E3F2FD插入操作时序图
sequenceDiagram
participant Caller as 调用线程
participant Lock as ReentrantLock
participant Heap as 堆数组
participant Condition as available条件
Caller->>Lock: lock()
activate Lock
Caller->>Heap: 检查容量,必要时扩容
Caller->>Heap: 新任务放入末尾 heap[size]
Caller->>Heap: siftUp(size) 上浮调整
loop 上浮过程 O(log n)
Heap->>Heap: 与父节点比较 delay
alt 当前节点 delay < 父节点
Heap->>Heap: 交换位置
else 当前节点 delay ≥ 父节点
Heap->>Heap: 停止上浮
end
end
alt 新任务成为根节点(delay最小)
Caller->>Condition: signal() 唤醒等待线程
end
Caller->>Lock: unlock()
deactivate Lock
Note over Caller,Condition: 插入复杂度:O(log n)<br/>比较次数:树高度 = log₂(n)获取/删除操作时序图
sequenceDiagram
participant Worker as Worker线程
participant Lock as ReentrantLock
participant Heap as 堆数组
participant Condition as available条件
Worker->>Lock: lock()
activate Lock
loop 等待可用任务
Worker->>Heap: 检查堆顶任务
alt 堆为空
Worker->>Condition: await() 释放锁,等待
Condition-->>Worker: 被signal唤醒
else 堆顶任务未到期
Worker->>Condition: awaitNanos(剩余delay)
Condition-->>Worker: 超时或被signal唤醒
else 堆顶任务已到期
Worker->>Worker: 跳出循环,继续执行
end
end
Worker->>Heap: 取出堆顶任务 result = heap[0]
Worker->>Heap: 末尾任务移到堆顶 heap[0] = heap[size-1]
Worker->>Heap: siftDown(0) 下沉调整
loop 下沉过程 O(log n)
Heap->>Heap: 与左右子节点比较,找最小
alt 当前节点 delay > 最小子节点
Heap->>Heap: 交换位置
else 当前节点 delay ≤ 子节点
Heap->>Heap: 停止下沉
end
end
Worker->>Lock: unlock()
deactivate Lock
Worker->>Worker: 执行任务 run()
Note over Worker,Heap: 删除复杂度:O(log n)<br/>需要维护堆性质取消操作的问题
sequenceDiagram
participant Caller as 调用线程
participant Lock as ReentrantLock
participant Heap as 堆数组
participant Task as 待取消任务
Caller->>Lock: lock()
activate Lock
Caller->>Task: cancel(false)
Task-->>Caller: 标记取消状态
Note over Caller,Task: 问题1:任务仍留在堆中!
alt 任务恰好是堆顶
Caller->>Heap: 立即移除并调整堆
else 任务在堆中间
Note over Caller: 任务不会立即从堆中移除
Note over Caller: 等到它成为堆顶时才被清理
end
Caller->>Lock: unlock()
deactivate Lock
Note over Caller,Heap: 问题2:取消后堆大小不变<br/>内存泄漏风险直到任务到期核心性能瓶颈分析
| 操作 | 时间复杂度 | 实际开销 | 高并发问题 |
|---|---|---|---|
| 插入 | O(log n) | ~15次比较 (n=30000) | 锁竞争严重 |
| 删除(take) | O(log n) | ~15次比较 | 单线程消费瓶颈 |
| 取消 | O(log n) 或延迟 | 查找+调整或仅标记 | 任务残留,内存占用 |
| 锁粒度 | 全局锁 | ReentrantLock | 所有操作串行化 |
graph TB
subgraph Bottleneck["ScheduledExecutorService 瓶颈"]
B1["全局锁 ReentrantLock"]
B2["最小堆的 O(log n) 操作"]
B3["单线程消费模型"]
B4["取消不立即回收内存"]
end
subgraph Impact["对 RPC 超时的影响"]
I1["10k QPS = 大量锁竞争"]
I2["30k 并发任务 = 频繁堆调整"]
I3["取消操作堆积,内存上涨"]
I4["延迟精度受调度影响"]
end
B1 --> I1
B2 --> I2
B3 --> I3
B4 --> I3
style Bottleneck fill:#FFCDD2
style Impact fill:#FFE0B2时间轮的优势:插入和取消都是 O(1)。
2.3.2 时间轮的工作原理
时间轮的灵感来自钟表。设想一个有 512 个刻度的表盘,指针每 100ms 走一格:
时间轮核心架构图
graph TB
subgraph HashedWheelTimerArchitecture["HashedWheelTimer 整体架构"]
direction TB
subgraph CoreComponents["核心组件"]
WheelArray["wheel: HashedWheelBucket[]<br/>环形槽位数组"]
WorkerThread["Worker 线程<br/>单线程驱动"]
TimeoutQueue["timeouts: Queue<br/>新任务缓冲队列"]
CancelledTimeouts["cancelledTimeouts: Queue<br/>待取消任务队列"]
end
subgraph SlotStructure["槽位结构"]
Bucket0["Bucket[0]"]
Bucket1["Bucket[1]"]
BucketN["Bucket[N-1]"]
subgraph BucketDetail["每个 Bucket 是双向链表"]
Head["head<br/>HashedWheelTimeout"]
Node1["timeout.next"]
Node2["timeout.next"]
Tail["tail"]
Head <--> Node1
Node1 <--> Node2
Node2 <--> Tail
end
end
WheelArray --> Bucket0
WheelArray --> Bucket1
WheelArray --> BucketN
WorkerThread -->|"tick++"| WheelArray
TimeoutQueue -->|"transferTimeoutsToBuckets()"| WheelArray
end
style WorkerThread fill:#C8E6C9
style WheelArray fill:#E3F2FD
style BucketDetail fill:#FFF3E0时间轮工作动画示意
graph LR
subgraph TimeWheelAnimation["时间轮运转示意(ticksPerWheel=8)"]
direction LR
T0["tick=0<br/>指针位置"]:::current
T1["tick=1"]
T2["tick=2"]
T3["tick=3"]
T4["tick=4"]
T5["tick=5"]
T6["tick=6"]
T7["tick=7"]
T0 -->|"tickDuration"| T1
T1 -->|"tickDuration"| T2
T2 -->|"tickDuration"| T3
T3 -->|"tickDuration"| T4
T4 -->|"tickDuration"| T5
T5 -->|"tickDuration"| T6
T6 -->|"tickDuration"| T7
T7 -->|"tickDuration<br/>取模回到"| T0
end
subgraph TaskPlacement["任务分布示例"]
TaskA["任务A<br/>delay=100ms<br/>tick=1, rounds=0"]
TaskB["任务B<br/>delay=850ms<br/>tick=5, rounds=1"]
TaskC["任务C<br/>delay=150ms<br/>tick=2, rounds=0"]
TaskD["任务D<br/>delay=1700ms<br/>tick=3, rounds=2"]
end
TaskA -.->|"放入"| T1
TaskB -.->|"放入"| T5
TaskC -.->|"放入"| T2
TaskD -.->|"放入"| T3
classDef current fill:#FF9800,color:#fff
classDef future fill:#E8F5E9关键计算公式
1 | |
添加任务时序图
sequenceDiagram
participant App as 应用线程
participant Timer as HashedWheelTimer
participant Queue as timeouts队列
participant Worker as Worker线程
participant Bucket as HashedWheelBucket
App->>Timer: newTimeout(task, 3000ms)
Timer->>Timer: 计算 deadline = nanoTime + 3s
Note over Timer: 不直接操作wheel<br/>避免并发竞争
Timer->>Queue: offer(newTimeout)
Queue-->>Timer: 加入成功
Timer-->>App: 返回 Timeout 对象
Note over Worker: Worker线程每tick周期
Worker->>Queue: transferTimeoutsToBuckets()
loop 批量转移(每次最多10000个)
Queue->>Worker: poll()
Worker->>Worker: 计算目标槽位 index
Worker->>Worker: 计算剩余轮数 rounds
alt rounds == 0 且 槽位已过期
Worker->>Worker: 立即执行任务
else
Worker->>Bucket: add(timeout)
Bucket-->>Worker: 插入双向链表尾部
end
end
Note over Worker: 复杂度:O(1) 添加Worker 线程主循环时序图
sequenceDiagram
participant Worker as Worker线程
participant Clock as 系统时钟
participant Wheel as wheel数组
participant Bucket as 当前Bucket
participant Timeout as HashedWheelTimeout
loop 无限循环(直到shutdown)
Worker->>Clock: waitForNextTick()
Clock-->>Worker: sleep到下一个tick
Note over Worker: 阶段1:转移新任务
Worker->>Worker: transferTimeoutsToBuckets()
Note over Worker: 阶段2:处理到期任务
Worker->>Worker: 计算当前槽位 bucketIdx = tick & mask
Worker->>Wheel: wheel[bucketIdx]
Wheel-->>Worker: 返回 Bucket
Worker->>Bucket: expireTimeouts(deadline)
loop 遍历链表
Bucket->>Timeout: 取出节点
alt timeout.remainingRounds <= 0
Bucket->>Timeout: expire() 执行超时回调
else if timeout.isCancelled()
Bucket->>Bucket: remove(timeout) 从链表移除
else
Timeout->>Timeout: remainingRounds--
end
end
Worker->>Worker: tick++
end任务到期判断逻辑详解
graph TB
subgraph ExpireLogic["到期判断流程"]
Start["获取当前槽位 Bucket"] --> CheckNode{"链表有节点?"}
CheckNode -->|Yes| GetNode["取出 timeout 节点"]
CheckNode -->|No| EndLoop["结束处理"]
GetNode --> CheckRounds{"remainingRounds <= 0?"}
CheckRounds -->|Yes| CheckCancelled1{"isCancelled?"}
CheckRounds -->|No| Decrement["remainingRounds--<br/>本轮未到期"]
CheckCancelled1 -->|Yes| Remove1["从链表移除<br/>跳过执行"]
CheckCancelled1 -->|No| Execute["expire()<br/>执行超时回调"]
Decrement --> NextNode1["下一个节点"]
Remove1 --> NextNode2["下一个节点"]
Execute --> NextNode3["下一个节点"]
NextNode1 --> CheckNode
NextNode2 --> CheckNode
NextNode3 --> CheckNode
EndLoop --> End["等待下一tick"]
end
subgraph RoundsExplanation["轮数概念解释"]
R0["remainingRounds = 0<br/>当前轮到期,立即执行"]
R1["remainingRounds = 1<br/>下一轮到期,等待一圈"]
R2["remainingRounds = 2<br/>下两轮到期,等待两圈"]
Example["例子:ticksPerWheel=8<br/>任务 delay=900ms, tickDuration=100ms<br/>ticks=9, slot=(current+9)%8=1<br/>rounds=9/8=1"]
end
style Execute fill:#C8E6C9
style Decrement fill:#FFE0B2
style Remove1 fill:#FFCDD2取消任务时序图
sequenceDiagram
participant Caller as 调用线程
participant Timeout as HashedWheelTimeout
participant State as state字段
participant Worker as Worker线程
Caller->>Timeout: cancel()
Timeout->>State: 原子操作:ST_INIT → ST_CANCELLED
Note over Timeout: 仅标记状态,不从链表中移除!
alt 尚未加入wheel(在timeouts队列中)
Timeout-->>Caller: 返回 true
Note over Timeout: 不会被加入wheel
else 已在wheel中
Timeout-->>Caller: 返回 true
Note over Worker: 等待Worker清理
end
Note over Worker: 当Worker遍历到该slot时
Worker->>Timeout: isCancelled()
Timeout-->>Worker: true
Worker->>Worker: 从链表移除节点
Note over Caller,Worker: 懒删除策略<br/>O(1) 取消,无锁操作添加任务:
1 | |
触发超时:
1 | |
取消任务:
1 | |
2.3.3 Netty HashedWheelTimer 核心源码
1 | |
2.3.4 为什么 HSF/Dubbo 选择时间轮?
graph TB
subgraph Comparison["三种超时方案对比"]
subgraph ParkNanos["方式1: parkNanos"]
P1["每个请求占一个线程"]
P2["10000 QPS = 30000 线程"]
P3["线程资源耗尽"]
end
subgraph FutureGet["方式2: Future.get(timeout)"]
F1["调用方线程阻塞等待"]
F2["同步模型,无法复用线程"]
F3["不适合异步 RPC"]
end
subgraph WheelTimer["方式3: HashedWheelTimer"]
W1["单线程管理所有超时"]
W2["O(1) 添加/取消"]
W3["完美适配高吞吐 RPC"]
end
end
style ParkNanos fill:#FFCDD2
style FutureGet fill:#FFE0B2
style WheelTimer fill:#C8E6C9| 维度 | parkNanos | Future.get(timeout) | HashedWheelTimer |
|---|---|---|---|
| 线程消耗 | 每个等待占一个线程 | 调用方线程阻塞 | 仅 1 个 Worker 线程 |
| 添加超时 | N/A | N/A | O(1) |
| 取消超时 | unpark | cancel | O(1) |
| 精度 | 纳秒级 | 纳秒级 | tickDuration 级(通常 100ms) |
| 适用并发量 | 低(< 100) | 中(< 1000) | 高(> 10000) |
| 编程模型 | 同步阻塞 | 同步阻塞 | 异步回调 |
| 典型使用者 | AQS, ReentrantLock | 业务代码 | Netty, Dubbo, HSF |
关键洞察:时间轮牺牲了精度(100ms 级),换来了吞吐量。对于 RPC 超时来说,3 秒的超时差 100ms 完全可以接受。但如果需要微秒级精度的超时(比如锁等待),时间轮就不合适了。
2.3.5 Dubbo 中的超时实现
1 | |
sequenceDiagram
participant Client as 客户端线程
participant Future as DefaultFuture
participant Timer as HashedWheelTimer
participant Server as 远程服务
Client->>Future: 创建 Future
Future->>Timer: newTimeout(3s)
Client->>Server: 发送 RPC 请求
Note over Client: 客户端线程可以去做别的事<br/>(异步模型,不阻塞)
alt 正常返回(< 3s)
Server-->>Future: received(response)
Future->>Future: complete(result)
Note over Timer: 下次 tick 时发现已完成,跳过
else 超时(>= 3s)
Timer->>Future: TimeoutCheckTask.run()
Future->>Future: completeExceptionally(TimeoutException)
end
Client->>Future: whenComplete / get2.3.6 时间轮与 NIO Selector:同构的设计哲学
细心的读者可能已经注意到,时间轮的架构与 Java NIO 的 Selector 模型有着惊人的相似性。两者解决的问题不同(超时管理 vs IO 多路复用),但底层的设计哲学完全同构——都是从"一个事件一个线程"到"一个线程管理所有事件"的范式转变。
架构同构性
graph TB
subgraph TimerWheel["HashedWheelTimer"]
TW_Worker["Worker 线程<br/>单线程轮询"]
TW_Wheel["wheel[] 环形数组<br/>按 tick 索引"]
TW_Bucket["Bucket 链表<br/>同一 slot 的超时任务"]
TW_Queue["timeouts 队列<br/>新任务缓冲"]
TW_Worker -->|"tick++ 推进"| TW_Wheel
TW_Wheel --> TW_Bucket
TW_Queue -->|"transferTimeoutsToBuckets()"| TW_Wheel
end
subgraph NIOSelector["NIO Selector"]
S_Thread["Selector 线程<br/>单线程轮询"]
S_Keys["SelectionKey 集合<br/>已注册的 channel"]
S_Ready["selectedKeys<br/>就绪的 channel"]
S_Register["register() 注册<br/>新 channel 缓冲"]
S_Thread -->|"select() 轮询"| S_Keys
S_Keys --> S_Ready
S_Register -->|"注册到 Selector"| S_Keys
end
style TW_Worker fill:#C8E6C9
style S_Thread fill:#C8E6C9
style TW_Wheel fill:#E3F2FD
style S_Keys fill:#E3F2FD| 维度 | HashedWheelTimer | NIO Selector |
|---|---|---|
| 核心线程 | Worker 线程(单线程) | Selector 线程(单线程) |
| 管理对象 | 超时任务(HashedWheelTimeout) | IO 通道(Channel + SelectionKey) |
| 注册方式 | newTimeout() → 缓冲队列 → wheel |
channel.register() → Selector |
| 轮询机制 | tick++,每 tick 检查当前槽位 |
select(),检查就绪的 channel |
| 事件触发 | remainingRounds <= 0 → 执行回调 |
isReadable()/isWritable() → 处理 IO |
| 取消方式 | timeout.cancel() 标记 → 懒删除 |
selectionKey.cancel() → 下次 select 清理 |
| 数据结构 | 环形数组 + 链表 | 红黑树/哈希表 + 就绪链表(epoll 实现) |
| 解决的问题 | 一个线程管理万级超时任务 | 一个线程管理万级网络连接 |
共同的设计模式:Reactor 模式的变体
两者本质上都是 Reactor 模式的具体应用——单线程事件循环(event loop)驱动大量并发事件的处理:
graph LR
subgraph ReactorPattern["Reactor 模式的核心循环"]
direction TB
Loop["while (running)"] --> Wait["等待事件<br/>Timer: sleep(tickDuration)<br/>Selector: select(timeout)"]
Wait --> Dispatch["分发事件<br/>Timer: expireTimeouts()<br/>Selector: 遍历 selectedKeys"]
Dispatch --> Handle["处理事件<br/>Timer: timeout.expire()<br/>Selector: handler.handle()"]
Handle --> Loop
end
style Wait fill:#FFE0B2
style Dispatch fill:#E3F2FD
style Handle fill:#C8E6C9共同的核心思想:
- 多路复用:用一个线程"复用"地处理大量并发事件,避免为每个事件分配独立线程
- 注册-轮询-回调:事件源先注册到管理器,管理器周期性轮询,就绪时回调处理
- 懒删除:取消操作只标记状态,实际清理延迟到下一次轮询周期
- 缓冲队列:新注册的事件先进入缓冲区,由轮询线程统一转移,避免并发竞争
关键差异
尽管架构同构,两者在具体实现上有重要差异:
| 差异点 | HashedWheelTimer | NIO Selector |
|---|---|---|
| 事件驱动方式 | 时间驱动:按固定 tick 推进,主动扫描 | IO 驱动:select() 阻塞等待,被动唤醒 |
| 精度模型 | 精度受 tickDuration 限制(通常 10~100ms) |
精度取决于 OS 内核通知(通常微秒级) |
| 空转行为 | 即使无任务到期,Worker 仍按 tick 推进(sleep) |
无就绪事件时,select() 阻塞,不消耗 CPU |
| 底层依赖 | 纯 Java 实现,无系统调用 | 依赖 OS 内核(Linux epoll / macOS kqueue) |
| 扩展性 | 通过增大 ticksPerWheel 减少哈希冲突 |
通过多 Selector 线程(Netty EventLoopGroup)扩展 |
最关键的差异在于事件驱动方式:Selector 是被动等待(IO 就绪时内核通知),而时间轮是主动扫描(按固定频率推进指针)。这决定了 Selector 在空闲时几乎不消耗 CPU,而时间轮即使没有任务到期也会持续 sleep-wake 循环。
Netty 的统一:当时间轮遇上 Selector
有趣的是,在 Netty 中,这两种机制被统一在同一个架构中协同工作:
graph TB
subgraph NettyArchitecture["Netty 中的协同"]
EventLoop["EventLoop 线程<br/>(Selector 线程)"]
Selector["Selector<br/>管理 IO 事件"]
Timer["HashedWheelTimer<br/>管理超时事件"]
EventLoop -->|"select() 处理"| Selector
EventLoop -->|"超时回调在 EventLoop 中执行"| Timer
Channel["Channel 注册"] --> Selector
Timeout["超时任务注册"] --> Timer
Selector -->|"IO 就绪"| Handler["ChannelHandler"]
Timer -->|"超时到期"| Handler
end
Note["Netty 的 EventLoop 同时驱动 IO 和超时<br/>Selector 负责 IO 多路复用<br/>HashedWheelTimer 负责超时管理<br/>两者共享同一个线程模型"]
style EventLoop fill:#C8E6C9
style Note fill:#FFF3E0Dubbo/HSF 的 RPC 超时正是这种协同的典型应用:Selector 负责监听网络响应,HashedWheelTimer 负责超时兜底。两者在同一个 Netty EventLoop 中协作,共同实现了高吞吐的异步 RPC 模型。
这种"IO 多路复用 + 超时多路复用"的组合,本质上是对 Reactor 模式的完整实现——一个线程同时管理"数据何时到达"和"等待是否超时"两类事件。
2.4 Java 超时机制选择决策树
graph TB
Start["需要超时控制"] --> Q1{"并发量多大?"}
Q1 -->|"< 100"| Q2{"需要纳秒精度?"}
Q2 -->|Yes| A1["方式1: parkNanos<br/>如 ReentrantLock.tryLock(timeout)"]
Q2 -->|No| A2["方式2: Future.get(timeout)<br/>简单直接"]
Q1 -->|"100 ~ 1000"| Q3{"同步还是异步?"}
Q3 -->|同步| A2
Q3 -->|异步| Q4{"需要高精度?"}
Q4 -->|Yes| A3["ScheduledExecutorService<br/>O(log n) 但精度高"]
Q4 -->|No| A4["方式3: HashedWheelTimer<br/>O(1) 但精度低"]
Q1 -->|"> 1000"| A4
style A1 fill:#E3F2FD
style A2 fill:#E8F5E9
style A3 fill:#FFF3E0
style A4 fill:#F3E5F52.5 展望:Virtual Thread 与 Structured Concurrency
前文反复提到 Java 超时机制复杂的根本原因:线程太重。JDK 21 引入的 Virtual Thread(虚拟线程)和 Structured Concurrency(结构化并发)正在从根本上改变这一局面。
Virtual Thread 对超时的影响
虚拟线程的创建成本极低(约几百字节栈空间),使得"一个请求一个线程"在 Java 中也变得可行——这与 Go 的 goroutine 模型非常接近。
1 | |
在虚拟线程模型下,Future.get(timeout) 的"一个等待占一个线程"问题不再严重,因为虚拟线程的阻塞不会占用操作系统线程。但这并不意味着时间轮失去了价值——时间轮解决的是"高效管理大量定时任务"的问题(O(1) 添加/取消),而非线程资源问题。在高吞吐 RPC 框架中,时间轮仍然是更优的选择。
Structured Concurrency:Java 版的 context 传播
JDK 21 的 StructuredTaskScope(预览特性)提供了一种与 Go context.WithTimeout 语义接近的超时模式:
1 | |
这种模式的关键优势:
| 维度 | 传统 Java | Structured Concurrency | Go context |
|---|---|---|---|
| 超时传播 | 手动传递 | scope 自动管理 | context 树自动传播 |
| 取消联动 | 需显式 cancel | scope 关闭时自动取消子任务 | 父 context 取消级联子 context |
| 资源泄漏 | 容易忘记 cancel | scope 保证清理 | defer cancel() 保证清理 |
| 可观测性 | 线程栈分散 | 结构化的父子关系 | context 树 |
Structured Concurrency 的出现意味着 Java 正在向 Go 的超时哲学靠拢:超时和取消应该是结构化的、可传播的、自动清理的。这是 Java 并发模型自 JDK 5 引入 java.util.concurrent 以来最重要的范式转变。
3. Go:channel 原生支持的超时范式
如果说 Java 的超时是"在线程模型上打补丁",那么 Go 的超时则是"从语言层面原生支持"。Go 的 CSP(Communicating Sequential Processes)模型让超时变得异常优雅。
3.1 select + time.After:最基础的超时
1 | |
原理:time.After(d) 返回一个 channel,在 d 时间后会收到一个值。select 同时监听多个 channel,哪个先就绪就走哪个分支。
sequenceDiagram
participant G as Goroutine
participant RC as resultChan
participant TC as time.After(3s)
participant S as select
G->>G: 发起 HTTP 请求
Note over S: select 同时监听两个 channel
alt 请求先返回
G->>RC: 写入结果
RC->>S: 就绪
S->>S: 走 resultChan 分支
else 超时先到
TC->>S: 3秒到,写入时间值
S->>S: 走 time.After 分支
Note over G: goroutine 仍在运行<br/>(与 Java Future.get 超时相同的问题)
end注意:在 Go 1.23 之前,time.After 存在内存泄漏风险。每次调用都会创建一个 Timer,如果在循环中使用且大部分不会触发超时,这些 Timer 直到触发后才会被 GC。从 Go 1.23 开始,未被引用的 Timer 即使尚未触发也可以被 GC 回收,这个问题已得到修复。但在使用较旧版本的 Go 时,仍应优先使用 context.WithTimeout 或手动管理 time.NewTimer。
3.2 context.WithTimeout:Go 的标准答案
1 | |
context 的精髓:超时可以传播。
graph TB
subgraph ContextTree["Context 传播树"]
Root["Background Context"]
Root --> C1["WithTimeout(3s)<br/>API Handler"]
C1 --> C2["WithTimeout(2s)<br/>DB Query"]
C1 --> C3["WithTimeout(2s)<br/>Redis Get"]
C1 --> C4["WithTimeout(1s)<br/>RPC Call"]
C4 --> C5["WithTimeout(500ms)<br/>子服务调用"]
end
Cancel["父 context 取消<br/>-> 所有子 context 自动取消"]
C1 -.->|"3s 到期"| Cancel
Cancel -.-> C2
Cancel -.-> C3
Cancel -.-> C4
Cancel -.-> C5
style Cancel fill:#FFCDD2
style Root fill:#E3F2FD1 | |
3.3 Go vs Java:超时哲学对比
| 维度 | Java | Go |
|---|---|---|
| 并发单元 | 线程(重量级,MB 级栈) | goroutine(轻量级,KB 级栈) |
| 超时代价 | 阻塞一个线程 | 阻塞一个 goroutine(几乎免费) |
| 超时传播 | 需要手动传递 | context 自动传播 |
| 取消机制 | Future.cancel() / Thread.interrupt() |
context.cancel() / channel close |
| 标准做法 | 没有统一标准 | context.WithTimeout 是唯一标准 |
| 语言支持 | 库级别 | 语言级别(select 是关键字) |
核心差异:Go 的 goroutine 极其轻量(创建成本约 2KB),因此"一个请求一个 goroutine"完全可行。Java 的线程是操作系统线程(创建成本约 1MB),因此必须用线程池复用,超时管理也因此更复杂。
这也解释了为什么 Go 不需要时间轮:goroutine 足够便宜,每个超时任务用一个 goroutine + timer 就够了。
4. JavaScript:事件循环中的超时艺术
JavaScript 是单线程的,没有"阻塞等待"的概念。所有的"等待"都是通过事件循环和回调实现的。这让超时的实现反而变得简单——因为根本不需要"唤醒"任何东西。
4.1 setTimeout:最原始的超时
1 | |
4.2 Promise.race:现代 JavaScript 的超时
1 | |
sequenceDiagram
participant EL as 事件循环
participant P1 as fetch Promise
participant P2 as timeout Promise
participant Race as Promise.race
EL->>P1: 发起 fetch
EL->>P2: 注册 setTimeout(3000)
EL->>Race: 监听两个 Promise
alt fetch 先完成
P1->>Race: resolve(response)
Race->>EL: 返回 response
Note over P2: setTimeout 仍会触发<br/>但 race 已 settled,无影响
else 超时先到
P2->>Race: reject(TimeoutError)
Race->>EL: 抛出 TimeoutError
Note over P1: fetch 仍在进行<br/>(无法真正取消)
end4.3 AbortController:真正的取消
Promise.race 的问题与 Java Future.get(timeout) 相同:超时不等于取消。fetch 请求仍在进行。AbortController 解决了这个问题:
1 | |
graph LR
A["AbortController"] -->|"创建"| B["AbortSignal"]
B -->|"传递给"| C["fetch()"]
B -->|"传递给"| D["ReadableStream"]
B -->|"传递给"| E["EventTarget"]
F["setTimeout"] -->|"超时触发"| G["controller.abort()"]
G -->|"设置 signal.aborted = true"| B
B -->|"触发 abort 事件"| C
C -->|"真正取消网络请求"| H["AbortError"]
style G fill:#FFCDD2
style H fill:#FFCDD24.4 Node.js 中的 AbortSignal.timeout(现代方式)
1 | |
5. Ruby:纤程与超时的优雅共舞
Ruby 的超时实现看起来最简洁,但暗藏玄机。
5.1 Timeout.timeout:标准库的甜蜜陷阱
1 | |
看起来很优雅,但 Timeout.timeout 的实现方式是危险的:
1 | |
sequenceDiagram
participant Main as 主线程
participant Timer as 计时线程
participant Block as 代码块
Main->>Timer: Thread.new { sleep(3) }
Main->>Block: yield(执行代码块)
alt 代码块先完成
Block->>Main: 返回结果
Main->>Timer: timer_thread.kill
else 超时先到
Timer->>Timer: sleep(3) 结束
Timer->>Main: current_thread.raise(Timeout::Error)
Note over Main: 异常可能在任何地方被抛出<br/>包括 ensure 块内部
end5.1.1 为什么说它危险?
问题:异常可能在任何位置被抛出,包括 ensure(相当于 Java 的 finally)块内部:
1 | |
5.2 更安全的替代方案
1 | |
6. 跨语言对比:超时机制全景表
graph TB
subgraph Spectrum["超时机制光谱"]
direction LR
Low["底层<br/>手动控制"] --> Mid["中层<br/>框架封装"] --> High["高层<br/>语言原生"]
end
subgraph Mechanisms["各语言定位"]
J1["Java: parkNanos"] -.-> Low
J2["Java: Future.get"] -.-> Mid
J3["Java: 时间轮"] -.-> Mid
G1["Go: context"] -.-> High
JS1["JS: AbortController"] -.-> Mid
R1["Ruby: Timeout"] -.-> High
end
style Low fill:#FFCDD2
style Mid fill:#FFE0B2
style High fill:#C8E6C96.1 终极对比表
| 维度 | Java parkNanos | Java Future.get | Java 时间轮 | Go context | JS Promise.race | JS AbortController | Ruby Timeout |
|---|---|---|---|---|---|---|---|
| 并发模型 | 线程 | 线程 | 线程 | goroutine | 事件循环 | 事件循环 | 线程 |
| 阻塞方式 | OS 级阻塞 | OS 级阻塞 | 不阻塞 | goroutine 阻塞 | 不阻塞 | 不阻塞 | OS 级阻塞 |
| 精度 | 纳秒 | 纳秒 | 毫秒 | 纳秒 | 毫秒 | 毫秒 | 秒 |
| 资源消耗 | 高(1线程/等待) | 高 | 低(1线程/全部) | 极低 | 极低 | 极低 | 高(1线程/超时) |
| 取消支持 | interrupt | cancel | cancel | context.cancel | 无 | abort | Thread.kill |
| 传播能力 | 无 | 无 | 无 | context 树 | 无 | signal 传递 | 无 |
| 安全性 | 高 | 高 | 高 | 高 | 中 | 高 | 低 |
| 适用场景 | 锁/同步原语 | 通用业务 | 高吞吐RPC | 所有场景 | 通用异步 | 网络请求 | 简单脚本 |
6.2 各语言的最佳实践
graph TB
subgraph BestPractice["各语言超时最佳实践"]
Java["Java"]
Go["Go"]
JS["JavaScript"]
Ruby["Ruby"]
end
Java --> JP["业务代码: CompletableFuture.orTimeout() (JDK 9+)<br/>RPC框架: HashedWheelTimer<br/>锁等待: tryLock(timeout)"]
Go --> GP["统一使用 context.WithTimeout<br/>通过 context 传播超时<br/>defer cancel() 防泄漏"]
JS --> JSP["网络请求: AbortSignal.timeout()<br/>通用异步: Promise.race<br/>Node.js: AbortController"]
Ruby --> RP["IO操作: 使用库自带的超时参数<br/>避免 Timeout.timeout<br/>考虑 IO.select"]
style JP fill:#FFF3E0
style GP fill:#E8F5E9
style JSP fill:#FFFDE7
style RP fill:#FCE4ECJava 9+ 的 CompletableFuture.orTimeout
值得一提的是,Java 9 在 CompletableFuture 上增加了原生超时支持:
1 | |
orTimeout 底层基于 ScheduledThreadPoolExecutor(CompletableFuture.Delayer 静态内部类),本质上是向一个全局共享的守护线程池提交延迟任务。这与 JavaScript 的 Promise.race + setTimeout 在 API 层面趋于一致,但底层机制截然不同:
| 维度 | Java orTimeout |
JavaScript setTimeout |
|---|---|---|
| 定时器 | ScheduledThreadPoolExecutor(线程池 + DelayQueue) |
事件循环内置定时器(libuv / 浏览器引擎) |
| 线程安全 | 需要 CAS 保证原子性 | 单线程,天然无竞态 |
| 资源开销 | 全局 1 个守护线程 + 堆操作 | 零额外线程 |
| 取消原始任务 | 不会自动取消 | 不会自动取消 |
二者的共同缺陷是:超时后原始任务都不会被真正取消。Java 需要配合 cancel(true) + 中断检查,JavaScript 需要使用 AbortController。关于 orTimeout 底层实现的详细源码分析,可参考 Java 线程池笔记 中 CompletableFuture 超时机制的深入讨论。
7. 深入:超时后的"善后"问题
超时只是故事的一半。另一半是:超时后,原来的任务怎么办?
这是所有语言都要面对的共同难题。
7.1 超时不等于取消:一个跨语言的通病
graph TB
subgraph Problem["超时后任务仍在运行"]
T["超时触发"] --> Q{"任务停了吗?"}
Q -->|"Java Future.get"| N1["否,需要 cancel(true)"]
Q -->|"Go select"| N2["否,goroutine 仍在运行"]
Q -->|"JS Promise.race"| N3["否,fetch 仍在进行"]
Q -->|"Ruby Timeout"| Y1["是,通过 Thread.raise"]
end
subgraph Solution["正确做法"]
S1["Java: future.cancel(true) + 检查中断"]
S2["Go: 传递 context,检查 ctx.Done()"]
S3["JS: AbortController.abort()"]
S4["Ruby: 但 Thread.raise 本身不安全"]
end
N1 --> S1
N2 --> S2
N3 --> S3
Y1 --> S4
style N1 fill:#FFCDD2
style N2 fill:#FFCDD2
style N3 fill:#FFCDD2
style Y1 fill:#C8E6C9
style S4 fill:#FFCDD27.2 Java 的中断协作模型
Java 的取消是协作式的。Thread.interrupt() 只是设置一个标志位,任务必须主动检查:
1 | |
7.3 Go 的 context 检查
1 | |
7.4 超时善后对比
| 语言 | 取消机制 | 是否协作式 | 能否真正停止任务 |
|---|---|---|---|
| Java | Thread.interrupt() |
是 | 取决于任务是否检查中断 |
| Go | context.cancel() |
是 | 取决于任务是否检查 ctx.Done() |
| JavaScript | AbortController.abort() |
是 | 取决于 API 是否支持 signal |
| Ruby | Thread.raise() |
否(强制) | 能,但可能破坏状态 |
结论:除了 Ruby 的 Thread.raise(不安全),所有现代语言都采用协作式取消。这意味着:编写任务的开发者有责任在适当的位置检查取消信号。
8. 超时与时钟:一个被忽视的深层问题
前面讨论的所有超时机制都隐含了一个假设:时钟是准确的。但在真实的分布式系统中,这个假设往往不成立。时钟的不准确性会从根本上影响超时的语义和正确性。
8.1 两种时钟:墙上时钟与单调时钟
操作系统提供两种截然不同的时钟源,它们的特性直接决定了超时实现的正确性:
| 特性 | 墙上时钟(Wall Clock) | 单调时钟(Monotonic Clock) |
|---|---|---|
| 含义 | “现在几点了?” | “过了多久?” |
| Java API | System.currentTimeMillis() |
System.nanoTime() |
| Go API | time.Now() (含墙上时钟分量) |
time.Since() / time.Until() |
| JS API | Date.now() |
performance.now() |
| Ruby API | Time.now |
Process.clock_gettime(CLOCK_MONOTONIC) |
| 是否可回退 | 是(NTP 校时可能回拨) | 否(只会单调递增) |
| 是否受闰秒影响 | 是 | 否 |
| 适合超时计算 | 否 | 是 |
graph TB
subgraph WallClock["墙上时钟 (Wall Clock)"]
W1["System.currentTimeMillis()"]
W2["基于 UTC,可被 NTP 调整"]
W3["可能向前跳跃或向后回拨"]
W4["适用于:日志时间戳、业务时间"]
end
subgraph MonoClock["单调时钟 (Monotonic Clock)"]
M1["System.nanoTime()"]
M2["基于 CPU 计数器,不受 NTP 影响"]
M3["保证单调递增,永不回退"]
M4["适用于:超时计算、性能度量"]
end
NTP["NTP 校时事件"] -->|"可能回拨数秒"| WallClock
NTP -.->|"无影响"| MonoClock
style WallClock fill:#FFCDD2
style MonoClock fill:#C8E6C9
style NTP fill:#FFE0B28.1.1 NTP 回拨导致的超时异常
考虑以下使用墙上时钟实现超时的错误代码:
1 | |
如果在等待期间发生 NTP 校时,System.currentTimeMillis() 可能突然向前跳跃或向后回拨:
sequenceDiagram
participant App as 应用程序
participant WC as 墙上时钟
participant NTP as NTP 服务器
App->>WC: currentTimeMillis() = 1000
App->>App: deadline = 1000 + 3000 = 4000
App->>App: sleep(3000)
Note over NTP,WC: NTP 校时:时钟回拨 5 秒
NTP->>WC: 调整时钟 -5000ms
App->>WC: currentTimeMillis() = -1000 (相对)
App->>App: remaining = 4000 - (-1000) = 5000
Note over App: 本应超时,却还要再等 5 秒!正确做法:使用单调时钟。
1 | |
8.1.2 各语言超时 API 的时钟选择
值得注意的是,成熟的超时 API 内部都使用单调时钟:
| API | 使用的时钟 | 安全性 |
|---|---|---|
Java LockSupport.parkNanos() |
单调时钟 | 安全 |
Java Object.wait(timeout) |
取决于 JVM 实现和平台 | 视版本而定 |
Java Thread.sleep(millis) |
取决于 JVM 实现和平台 | 视版本而定 |
Java System.nanoTime() |
单调时钟 | 安全 |
Go time.After() |
单调时钟 | 安全 |
Go context.WithTimeout() |
单调时钟 | 安全 |
JS setTimeout() |
事件循环 tick | 安全(单线程) |
Ruby Timeout.timeout() |
sleep(墙上时钟) |
不安全 |
关键发现:Java 的 Object.wait(timeout) 和 Thread.sleep(millis) 的时钟行为取决于 JVM 实现和操作系统平台。在较旧的 JDK 版本和某些平台上,它们基于 CLOCK_REALTIME(墙上时钟),可能受 NTP 回拨影响;在较新的 HotSpot 实现中(尤其是 Linux 平台),已逐步迁移到 CLOCK_MONOTONIC。但由于行为的平台依赖性,Doug Lea 在 java.util.concurrent 中全面采用 System.nanoTime() 和 LockSupport.parkNanos(),从 API 层面消除了这种不确定性。
8.2 分布式超时:当时钟不可信时
在单机环境中,单调时钟足以保证超时的正确性。但在分布式系统中,问题变得更加复杂:不同机器的时钟可能不一致。
8.2.1 分布式超时的困境
sequenceDiagram
participant Client as 客户端<br/>时钟: 10:00:00.000
participant Server as 服务端<br/>时钟: 10:00:00.300
Note over Client,Server: 两台机器的时钟差 300ms
Client->>Server: RPC 请求 (timeout=1000ms)
Note over Client: 客户端 deadline = 10:00:01.000
Server->>Server: 处理请求...耗时 800ms
Note over Server: 服务端视角:10:00:01.100 完成
Server-->>Client: 返回响应
Note over Client: 客户端视角:10:00:01.200 收到响应
Note over Client: 10:00:01.200 > deadline(10:00:01.000)
Note over Client: 判定超时!但服务端其实在 800ms 内完成了这个例子揭示了一个根本性问题:分布式超时的判定依赖于本地时钟,而非全局一致的时间。在实践中,RPC 框架的超时通常是从客户端发出请求的那一刻开始计时(使用本地单调时钟),这避免了跨机器时钟不一致的问题。
8.2.2 Google TrueTime:当时钟成为 API
Google 的 Spanner 数据库面临了一个更极端的问题:它需要全球范围内的事务一致性,而这依赖于全局有序的时间戳。
传统的时钟 API 返回一个时间点:now() = t。但 Google 认为这是一个谎言——任何时钟都有误差。于是 TrueTime 返回的是一个时间区间:
1 | |
graph TB
subgraph Traditional["传统时钟 API"]
T1["now() = 10:00:00.000"]
T2["假装精确,实际有未知误差"]
end
subgraph TrueTime["Google TrueTime API"]
TT1["now() = [10:00:00.000, 10:00:00.007]"]
TT2["诚实地暴露不确定性"]
TT3["误差范围: 1~7ms (GPS + 原子钟)"]
end
subgraph Impact["对超时的影响"]
I1["传统: deadline = now + timeout<br/>可能因时钟误差而不准"]
I2["TrueTime: deadline = now.latest + timeout<br/>保守但正确"]
end
Traditional --> I1
TrueTime --> I2
style Traditional fill:#FFCDD2
style TrueTime fill:#C8E6C9Spanner 利用 TrueTime 实现了一个关键的等待机制:commit-wait。在提交事务后,Spanner 会等待 TrueTime 的不确定性窗口过去,以确保后续事务的时间戳一定大于当前事务。这本质上是一种基于时钟不确定性的超时等待:
1 | |
8.2.3 超时与因果序(Causal Ordering)
在分布式系统中,还有一个更深层的问题:超时判定的因果正确性。
Leslie Lamport 在 1978 年提出的逻辑时钟(Logical Clock)揭示了一个关键洞察:在分布式系统中,重要的不是"事件发生在什么时间",而是"事件之间的因果关系"。
graph LR
subgraph PhysicalTime["物理时钟视角"]
PT1["事件A: 10:00:00.000"] --> PT2["事件B: 10:00:00.001"]
PT3["问题: A 真的在 B 之前吗?<br/>如果时钟有 10ms 误差呢?"]
end
subgraph LogicalTime["逻辑时钟视角"]
LT1["事件A: LC=5"] -->|"消息传递"| LT2["事件B: LC=6"]
LT3["结论: A 因果先于 B<br/>与物理时钟无关"]
end
style PhysicalTime fill:#FFCDD2
style LogicalTime fill:#C8E6C9这对超时机制的启示是:
| 场景 | 物理时钟超时 | 逻辑时钟/因果序 |
|---|---|---|
| 单机超时 | 单调时钟足够 | 不需要 |
| RPC 超时 | 客户端本地单调时钟 | 不需要(单次请求-响应) |
| 分布式事务超时 | 需要 TrueTime 级别的保证 | 可用向量时钟辅助 |
| 分布式锁超时 | 物理时钟不可靠 | 需要 fencing token 等机制 |
分布式锁的超时陷阱:
sequenceDiagram
participant C1 as 客户端1
participant Lock as 分布式锁(Redis)
participant DB as 数据库
C1->>Lock: 获取锁 (TTL=3s)
Note over C1: 开始处理...
Note over C1: GC 停顿 5 秒!
Note over Lock: 3秒后锁自动过期
Note over Lock: 客户端2 获取了锁
C1->>DB: 写入数据(以为自己还持有锁)
Note over DB: 数据被覆盖!这个问题的根源在于:超时(TTL)是基于物理时钟的,但进程的执行可能因 GC、页面换出等原因暂停任意长时间。解决方案不是更精确的时钟,而是引入因果序机制(如 fencing token):
1 | |
8.3 时钟问题总结
graph TB
subgraph ClockSummary["时钟与超时:决策指南"]
Q1{"超时场景?"} --> |"单机"| A1["使用单调时钟<br/>Java: System.nanoTime()<br/>Go: time.Since()"]
Q1 --> |"RPC"| A2["客户端本地单调时钟<br/>不依赖服务端时钟"]
Q1 --> |"分布式事务"| A3["需要 TrueTime 或<br/>逻辑时钟辅助"]
Q1 --> |"分布式锁"| A4["TTL + fencing token<br/>不能仅依赖超时"]
end
style A1 fill:#C8E6C9
style A2 fill:#C8E6C9
style A3 fill:#FFE0B2
style A4 fill:#FFCDD2核心要点:
- 单机超时:始终使用单调时钟(
System.nanoTime()),避免 NTP 回拨影响 - RPC 超时:基于客户端本地单调时钟计时,与服务端时钟无关
- 分布式场景:物理时钟不可完全信任,需要结合逻辑时钟或 fencing token 等因果序机制
- TrueTime 的启示:与其假装时钟精确,不如诚实地暴露不确定性
9. 总结:超时的设计哲学
graph TB
subgraph Philosophy["超时设计的四个层次"]
L1["第一层:能超时<br/>至少有一种机制让等待不会永远持续"]
L2["第二层:能取消<br/>超时后能真正停止底层任务"]
L3["第三层:能传播<br/>超时/取消信号能沿调用链传递"]
L4["第四层:时钟正确<br/>超时计算不受时钟漂移/回拨影响"]
end
L1 --> L2 --> L3 --> L4
L1 -.-> E1["所有语言都能做到"]
L2 -.-> E2["需要协作式设计"]
L3 -.-> E3["Go (context) 和 JS (AbortSignal) 原生支持"]
L4 -.-> E4["需要单调时钟 + 分布式场景需要额外机制"]
style L1 fill:#C8E6C9
style L2 fill:#FFE0B2
style L3 fill:#E3F2FD
style L4 fill:#F3E5F5回到最初的问题:为什么 HSF/Dubbo 用时间轮而不是 Future.get(timeout)?
答案可以从四个维度来理解:
- 资源效率:
Future.get(timeout)每个等待占一个线程;时间轮用一个线程管理所有超时 - 编程模型:
Future.get是同步阻塞的;时间轮是异步回调的,天然适配 Netty 的异步 IO 模型 - 性能:时间轮的添加/取消是 O(1);
ScheduledExecutorService是 O(log n) - 精度权衡:RPC 超时通常是秒级,100ms 的精度损失完全可以接受
每种超时机制都有其最佳适用场景。没有银弹,只有 trade-off。理解这些 trade-off,才能在面对具体问题时做出正确的选择。
参考资料:
- Doug Lea, Concurrent Programming in Java, Addison-Wesley
- Netty HashedWheelTimer 源码
- Go context 包文档
- MDN AbortController
- Ruby Timeout 的问题
- George Varghese & Tony Lauck, Hashed and Hierarchical Timing Wheels, IEEE/ACM Transactions on Networking, 1997
- Dubbo 超时机制源码分析
- 美团技术团队:Java 线程池实践
- Leslie Lamport, Time, Clocks, and the Ordering of Events in a Distributed System, 1978
- James C. Corbett et al., Spanner: Google’s Globally-Distributed Database, OSDI 2012
- Martin Kleppmann, Designing Data-Intensive Applications, O’Reilly, Chapter 8: The Trouble with Distributed Systems
- How to do distributed locking - Martin Kleppmann